





 20 / 60
20 / 60

18
April 2020
speed, the controller calculates the required rotary motion
of each MLA rotation. Also, with Easy Drive, the operator
can tune the rectilinear speed by pushing more or less on
each remote control unit joystick (Figure 2). This allows
smooth displacement with virtually no oscillation of the
connection flange.
Easy Drive offers significant advantages over the
conventional on-off hydraulic control, especially for
exposed terminals experiencing ship wave induced
motions, or those with high operator turnover. Easy Drive:
z
Minimises operator’s training requirements as the
control is fully intuitive.
z
Minimises the risk of damage to the manifold flange
and seal, thanks to a smooth control of the MLA
connection flange motions.
z
Reduces connection time as the MLA connection
flange trajectories are straightforward (Figure 3).
z
Enables the MLA connection in more dynamic
conditions; tested at scale 1 using a test bench
reproducing the ship manifold motions.
All current MLA facilities can be upgraded to
Easy Drive with minimum hardware modifications and
downtime:
z
Replacement of slew, inboard arm and outboard arm
solenoid valves, generally located in a cabinet near
the base of each MLA by proportional valves.
z
Installation of slew, inboard arm and outboard arm
angular sensors (MLAs with position monitoring
systems need no upgrade).
z
Most of the remote control units (RCUs) in operation
are suitable for proportional control and do not need
to be replaced.
Easy Drive is patented and has been fully prototype
tested and witnessed by Lloyds Register, and can be
demonstrated in TechnipFMC Loading Systems’ facilities in
Sens, France. It has already been implemented on new
projects and several upgrading of existing installation are
currently ongoing.
Green and OPEX-effective
The e-MLA development was premised on maintaining
the same functionalities as the hydraulic MLA, but
changing hydraulic actuated functions to electric actuated
functions, i.e. arm manoeuvring, e-ERS and e-QC/DC.
A structured and risk-based approach was followed to
identify and address the novelty aspects of the e-MLA,
particularly where existing standards and guidelines were
not directly applicable and to develop a fit-for-purpose
design and operation philosophy. Off-the-shelf equipment,
induction gearmotors and motor controllers were selected
and integrated with particular attention paid to easing
operator access to each actuator (Figure 4).
The ability to meet the expected performance standard
has been further confirmed through extensive prototype
tests of the new primary components – manoeuvring
actuator, e-QC/DC and e-ERS – under normal and
degraded operating conditions. A dedicated test bench
was used to apply designing load cases to the e-MLA
manoeuvring actuator (Figure 5), including manoeuvring
in balanced and unbalanced conditions, emergency
retraction and freewheeling. A climatic chamber was used
to perform tests under ambient temperatures up to -30°C.
These tests allowed the key parameters of the electrical
actuator (equivalent inertia, friction and damping) used in
the e-MLA finite element model to be characterised.
e-QC/DC and e-ERS have been prototype tested
against the same protocols used for hydraulic (‘Design and
Construction Specification for Marine Loading Arms’ –
3
rd
Edition 1999 – OCIMF and ISO 16904, Figure 5).
Compliance of the e-ERS with a SIL2 Safety Instrumented
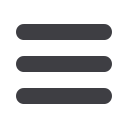
Figure 4.
Electric MLA (e-MLA) manoeuvring actuators,
slew (red), inboard arm (blue) and outboard arm (green).
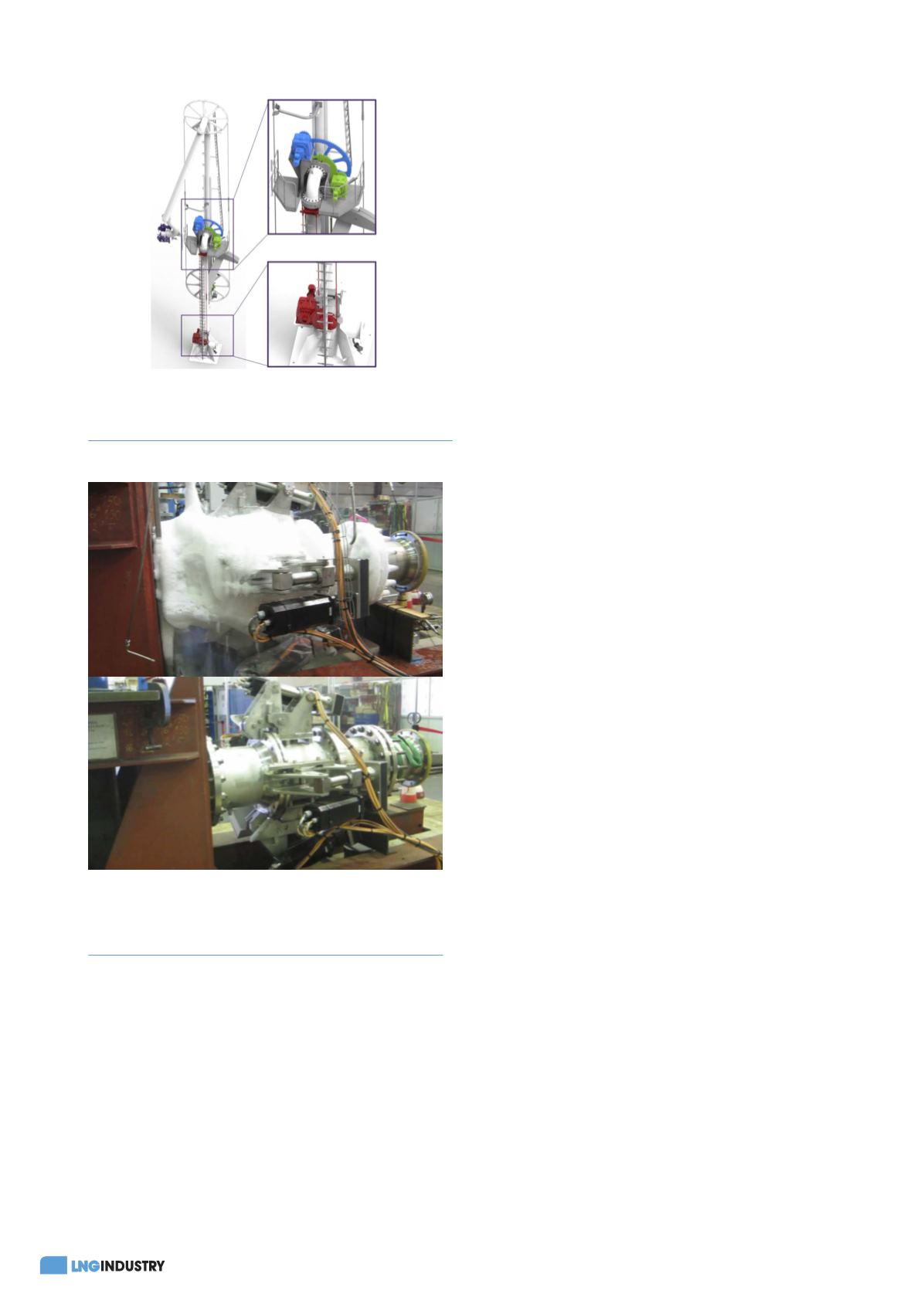
Figure 5.
Electric quick connect/disconnect coupler
(e-QC/DC) qualification test (ambient and cryogenic
temperatures).